努力打造中(zhōng)國數控機床行業品牌
![]() 台灣原廠技術
台灣原廠技術 ![]() 廠家(jiā)直銷
廠家(jiā)直銷
服務熱線:
400-106-3006
努力打造中(zhōng)國數控機床行業品牌
![]() 台灣原廠技術
台灣原廠技術 ![]() 廠家(jiā)直銷
廠家(jiā)直銷
服務熱線:
400-106-3006
聯係人(rén):陳總
手機: 400-106-3006
傳真: 0523-80931188
網址:http://www.ncxyjt.com
地址:泰州薑堰華港鎮龍溪工業園區(qū)
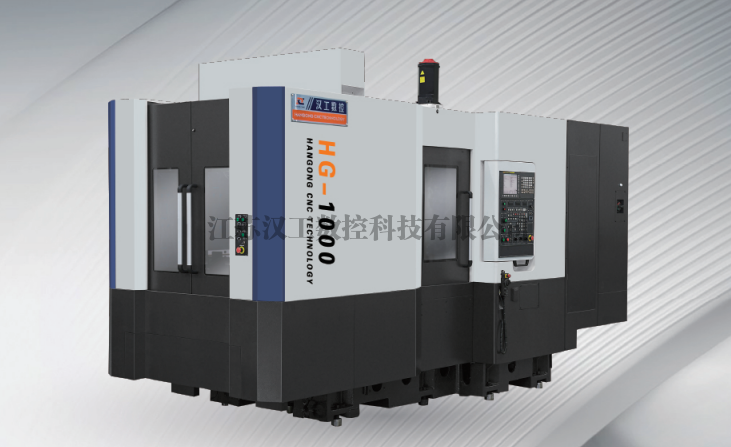
伺服係統是以機械運動的驅動設備,電動機為控(kòng)製(zhì)對象(xiàng),以控製器為核(hé)心,以電力(lì)電子功率變換裝置為執行機構,在自動(dòng)控製(zhì)理論的指導下(xià)組成的電氣傳動自動控製係統。
作為數控加工中心的執行機構,伺服(fú)係(xì)統將電力(lì)電子器件、控製、驅動及(jí)保護等(děng)集為一體,並(bìng)隨著數字(zì)脈寬調製技術、特種電(diàn)機材料技術、微電子技術及現代控製技術(shù)的(de)進步,經(jīng)曆了從步進到直流,進而到交流的發展曆程。數控機床中的伺服係統種類繁多,本文通過(guò)分(fèn)析(xī)其結構及簡單歸分(fèn),對其技術現狀及發展趨勢作簡要探討。

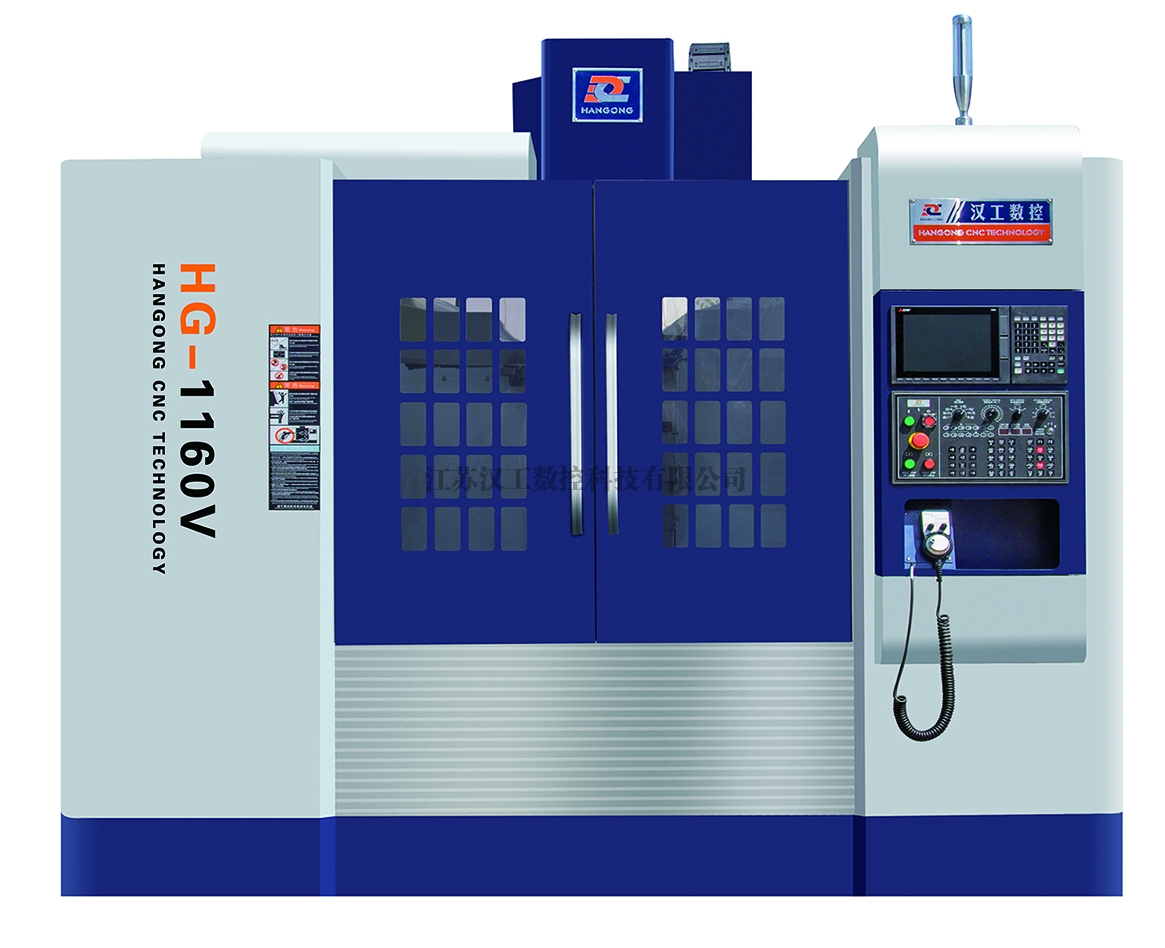
從基本結構來看,伺服係統主要由三部分組成:控製器、功率(lǜ)驅動裝置、反饋裝置和電動機。控製器按照數控係統(tǒng)的給定值和通過反饋裝置檢測的實際運行值的差,調節控(kòng)製量;功率驅動裝置作為係統的主回路,一方麵按控(kòng)製量的大小將電(diàn)網中的電(diàn)能作用到電(diàn)動機之上,調節電動機轉(zhuǎn)矩的大小,另(lìng)一方麵按電動機的要求把恒壓(yā)恒頻的電網供電轉(zhuǎn)換為電動機所(suǒ)需的交流電或直流電;電動機則按供電大小拖動機械運轉。
進給伺服以數控(kòng)機床的各坐標為控製對象,產生(shēng)機床的切削進(jìn)給運動(dòng);步進伺服是一種用(yòng)脈衝信號進行控製,並將脈衝信號轉換成相應的角位移的(de)控製係統。


服務熱線:400-106-3006
手(shǒu)機:135-8490-8969 陳總
郵箱:tonkyo@163.com
公(gōng)司地址:泰州(zhōu)薑堰華港鎮龍溪工業園區
加(jiā)工")